Системаҳои shuttle 4D барои истифодаи бори вазнин
Тавсифи
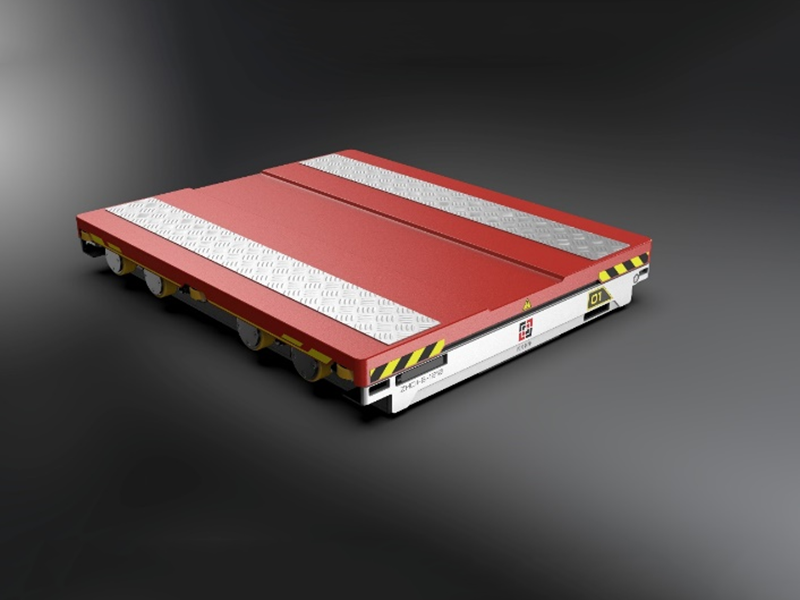
Ҳамчун таҷҳизоти асосии системаи нигаҳдории зич интеллектуалӣ, 4D-shuttle асосан аз комбинатсияи чорчӯба, системаи барқ, системаи таъминоти барқ, системаи ронандагӣ, системаи бардоред, системаи санҷандаро ва ғайра иборат аст. Он дорои панҷ шеваи: назорати дурдаст, дастӣ, нимавтоматӣ, худкор маҳаллӣ ва худкор онлайн. Он бо муҳофизати сершумори амниятӣ ва огоҳиҳои амниятӣ, ҳушдорҳои амнияти минтақавӣ, ҳушдорҳои бехатарии амалиётӣ ва ҳушдорҳои интерактивии амният меояд. Корпусҳо бо кафшери аз газ муҳофизатшаванда ва болтҳои мустаҳкам пайваст карда мешаванд. Комбинатсияи rack сохтори дуқабатаро қабул мекунад. Намуди зоҳирӣ ҳама бо дорупошӣ ранг карда шудааст ва қисмҳои коркардшуда ва кронштейнҳои электрикӣ электролиз карда шудаанд. Он ду маҷмӯи системаи ронандагӣ ва ду маҷмӯи системаи бардоранда дорад. Системаҳои ронандагӣ ба самтҳои XY масъуланд. Яке аз системаҳои борбардорӣ барои бардоштани борҳо ва дигаре барои гузариши хатти ибтидоӣ ва дуюмдараҷа масъул аст. Самти баландии Z метавонад бо истифода аз лифтҳои фармоишӣ тағирёбии қабати 4D-shuttle амалӣ кунад. Барои амалӣ кардани функсияи дастрасии фазои сеченака.
Сохтори навъи бори вазнин асосан бо версияи стандартӣ якхела аст. Фарқияти асосӣ дар он аст, ки иқтидори борбардорӣ хеле беҳтар шудааст ва иқтидори борбардорӣ нисбат ба версияи стандартӣ тақрибан ду баробар хоҳад шуд. Тарҳи борбардории механизми борбардорӣ мустаҳкам карда шуда, иқтидори муҳаррики борбардор зиёд карда мешавад, то ки иқтидори борбардорӣ ба 2,5Т мерасад. Қувваи мотори сайёҳӣ бетағйир мемонад. Барои зиёд кардани истеҳсолот, коэффитсиенти коҳиш зиёд карда мешавад ва суръати корбарии 4D мутаносибан кам мешавад.
тиҷорати стандартӣ
Монтаж ва нигоҳдории квитансия аз анбор
Ҷойгиршавӣ ва қабати тағир додани пардохти инвентаризатсия
Параметрҳои техникӣ
| лоиҳа | Маълумоти асосӣ | Эзоҳ | |
| модел | SX-ZHC-T-1210-2T | ||
| Табақи татбиқшаванда | Бар: 1200мм Чуқур: 1000мм | ||
| Максимум сарборӣ | Максимум 2500кг | ||
| баландӣ / вазн | Баландии бадан: 150мм, Вазни Shuttle: 350KG | ||
| Роҳи асосии X | суръат | Максимум бидуни сарборӣ: 1,5 м/с, ҳадди аксар сарбории пурра: 1 ,0 м/с | |
| суръатбахшии роҳ | ≤ 1,0м/С2 | ||
| мотор | Brushless Servo Motor 48VDC 1 5 00W | Сервои воридотӣ | |
| Ронандаи сервер | Ронандаи сервои бе хасу | Сервои воридотӣ | |
| Ба самти Y роҳ равед | суръат | Максимум бебор: 1,0 м/с, ҳадди аксар сарборӣ: 0,8 м/с | |
| суръатбахшии роҳ | ≤ 0,6м/С2 | ||
| мотор | Brushless Servo Motor 48VDC 15 00W | Сервои воридотӣ | |
| Ронандаи сервер | Ронандаи сервои бе хасу | Сервои воридотӣ | |
| кашондани бор | Баландии ҷингила | 30 мм _ | |
| мотор | Муҳаррики бе хасу 48VDC 75 0W | Сервои воридотӣ | |
| қуттии асосӣ | Баландии ҷингила | 35 мм | |
| мотор | Муҳаррики бе хасу 48VDC 75 0W | Сервои воридотӣ | |
| Усули асосии канал/ҷойгиркунӣ | Ҷойгиркунии роҳ: ҷойгиркунии штрих-код / ҷойгиркунии лазер | Олмон P+F/SICK | |
| Усули дуюмдараҷаи канал/ҷойгиркунӣ | Ҷойгиркунии роҳ: фотоэлектрикӣ + рамзгузор | Олмон P+F/SICK | |
| Ҷойгиркунии табақ: лазер + фотоэлектрикӣ | Олмон P+F/SICK | ||
| Системаи назорат | S7-1200 PLC Controller Programmable | Олмон SIEMENS | |
| назорати дурдаст | Басомади корӣ 433MHZ, масофаи алоқа на камтар аз 100 метр | Воридоти фармоишӣ | |
| Таъмини нерӯ | батареяи литий | Сифати баланди ватанй | |
| Параметрҳои батарея | 48V, 30AH, вақти истифода ≥ 6h, вақти пуркунӣ 3h, маротиба барқгиранда: 1000 маротиба | Иқтидор метавонад вобаста ба андозаи мошин фарқ кунад | |
| усули назорати суръат | Назорати Servo, моменти доимии суръати паст | ||
| Усули назорати салиб | Банақшагирии WCS, назорати компютери ламсӣ, назорати дурдаст | ||
| сатҳи садои корӣ | ≤60дб | ||
| Талабот ба ранг | Комбинатсияи раф (сиёҳ), сарпӯши боло сурх, пеш ва пушти алюминий сафед | ||
| ҳарорати муҳити зист | Ҳарорат: 0 ℃ ~ 50 ℃ Намӣ: 5% ~ 95% (бе конденсатсия) | ||


