-

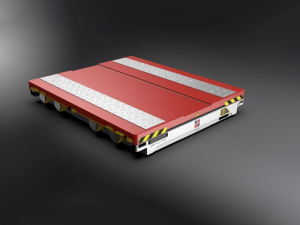
Навъи стандартии шаттли 4D - насли аввал
Ҳамчун таҷҳизоти асосии анбори пуриқтидори интеллектуалии чорҷонибаи мошин, мошини амудӣ ва уфуқӣ асосан аз васлкунии рафҳо, системаи барқ, системаи таъминоти барқ, системаи гардонанда, системаи домкрат, системаи сенсорӣ ва ғайра иборат аст.
-

Навъи стандартии шаттли 4D - Насли дуюм
Ҳамчун таҷҳизоти асосии анбори зичи интеллектуалии чорҷониба, шаттли чорҷониба асосан аз васлкунии чаҳорчӯба, системаи барқ, системаи таъминоти барқ, системаи гардонанда, системаи бардоранда, системаи сенсорӣ ва ғайра иборат аст.
-

AMR
Аробаи AMR воситаи нақлиётест, ки бо дастгоҳҳои роҳнамоии автоматӣ, ба монанди электромагнитӣ ё оптикӣ муҷаҳҳаз шудааст ва метавонад дар масири роҳнамоии муқарраршуда ҳаракат кунад, дорои ҳифзи бехатарӣ ва вазифаҳои гуногуни интиқол мебошад. Дар замимаҳои саноатӣ, ин воситаи нақлиётест, ки ба ронанда ниёз надорад. Манбаи нерӯи он батареяи барқгиранда аст.
AMR зери об: пинҳонӣ ба қаъри мошини боркаши мавод ворид шавед ва ба таври худкор барои анҷом додани амалиёти интиқоли мавод ва коркарди дубора насб ва ҷудо карда шавад. Бар асоси технологияҳои гуногуни мавқеъгирӣ ва навигатсия, воситаҳои нақлиёти худкор, ки ронандагии инсонро талаб намекунанд, дар маҷмӯъ AMR номида мешаванд.
-

Паллетизатор
Паллетизатор маҳсули омезиши органикии мошинҳо ва барномаҳои компютерӣ мебошад, ки самаранокии истеҳсолоти муосирро беҳтар мекунад. Мошинҳои паллетизатсия дар саноати паллетизатсия ба таври васеъ истифода мешаванд. Роботҳои паллетизатсия метавонанд хароҷоти меҳнат ва фазои фаршро ба таври назаррас сарфа кунанд.
Роботи паллеткунӣ чандир, дақиқ, зуд, самаранок, устувор ва самаранок аст.
Системаи роботи паллеткунӣ аз дастгоҳи роботи координатӣ истифода мебарад, ки бартариҳои хурди изофа ва ҳаҷми хурдро дорад. Идеяи таъсиси хатти пурра автоматии васлкунии мошинҳои блокӣ, ки самаранок, самаранок ва сарфакунандаи энергия мебошанд, метавонад амалӣ карда шавад.
-

Мошини қаткунии табақча
Мошини қаткунии табақча як таҷҳизоти автоматӣ аст, ки онро мошини табақи рамзӣ низ меноманд ва дар системаи интиқоли табақчаҳо, дар якҷоягӣ бо конвейерҳои гуногун, барои тақсим кардани табақчаҳои холӣ ба хатти интиқол истифода мешавад. Мошини қаткунии табақча барои ҷамъ кардани паллетҳои алоҳида ба ҳамворкунии паллетҳо, аз ҷумла: сохтори дастгирии ҳамворкунии паллет, мизи бардоштани паллет, сенсори боркунӣ, муайянкунии мавқеи паллет, сенсори кушодан/пӯшидани робот, бардоранда, пасткунанда, тугмаи мавқеи марказӣ истифода мешавад.
-

RGV
RGV мухтасари "Rail Guide Vehicle" аст, ки онро аробача низ меноманд. RGV дар анборҳо бо усулҳои гуногуни нигоҳдории зичии баланд истифода мешавад ва роҳравҳоро мувофиқи ҳар гуна дарозӣ тарҳрезӣ кардан мумкин аст, то иқтидори нигоҳдории тамоми анбор афзоиш ёбад. Ғайр аз ин, ҳангоми кор, шумо инчунин метавонед аз он истифода баред, ки барои борбардор лозим нест, ки ба роҳи хатсайр ворид шавад, дар якҷоягӣ бо ҳаракати босуръати аробача дар роҳи хатсайр, он метавонад самаранокии кори анборро самаранок беҳтар кунад ва онро бехатартар гардонад.
-

Системаҳои интиқоли 4D барои ҳарорати паст
Сохтори версияи ҳарорати пасти чӯби салиб асосан бо версияи стандартӣ якхела аст. Фарқи асосӣ дар муҳитҳои гуногуни корӣ аст. Версияи ҳарорати пасти чӯби салиб асосан дар муҳити -30 ℃ истифода мешавад, аз ин рӯ интихоби маводи дохилии он хеле фарқ мекунад. Ҳамаи ҷузъҳои дохилӣ муқовимати ҳарорати паст доранд ва батарея инчунин батареяи баландсифати ҳарорати паст аст, ки метавонад пуркунии барқро дар муҳити -30 °C дастгирӣ кунад. Илова бар ин, системаи назорати дохилӣ инчунин мӯҳр карда шудааст, то аз конденсатсияи оби оби берун аз анбор пешгирӣ карда шавад.
-

Системаҳои интиқоли 4D барои истифодаи суръати баланд
Механизми версияи баландсуръати мошини амудӣ ва уфуқӣ асосан бо мошини оддии амудӣ ва уфуқӣ якхела аст, фарқияти асосӣ дар беҳтар шудани суръати роҳгардӣ аст. Бо назардошти молҳои паллетии нисбатан муқаррарӣ ва устувор, барои беҳтар кардани самаранокии умумии лоиҳа ва кам кардани шумораи чӯбҳои истифодашуда, версияи баландсуръати чӯби салибӣ пешниҳод карда мешавад. Индекси суръати роҳгардӣ ду маротиба аз версияи стандартӣ зиёдтар аст ва суръати домкрат бетағйир боқӣ мемонад. Барои беҳтар кардани бехатарӣ, дар таҷҳизот лазери бехатарӣ муҷаҳҳаз шудааст, то хатари кори баландсуръатро пешгирӣ кунад.
-
Системаҳои интиқоли 4D барои истифодаи борҳои вазнин
Механизми чӯби салибӣ асосан бо версияи стандартӣ якхела аст, фарқияти асосӣ дар он аст, ки иқтидори борбардории он ба таври назаррас беҳтар шудааст. Иқтидори борбардории он қариб ду баробар зиёдтар аз версияи стандартӣ хоҳад буд ва мутаносибан суръати мувофиқи давидан низ коҳиш меёбад. Ҳам суръати роҳгардӣ ва ҳам суръати қафокашӣ коҳиш меёбад.
-

Рафҳои зич барои шаттлҳои 4D
Рафи анбори чорҷонибаи пуршиддат асосан аз қисмҳои раф, чӯбҳои салибии зерканалӣ, роҳҳои зерканалӣ, дастгоҳҳои чӯбҳои уфуқии пайвасткунӣ, чӯбҳои салибии канали асосӣ, роҳҳои канали асосӣ, пайваст кардани рафҳо ва замин, пойҳои танзимшаванда, кашидани қафо, тӯрҳои муҳофизатӣ, зинапояҳои нигоҳдорӣ иборат аст. Маводи асосии раф Q235/Q355 буда, ашёи хоми Baosteel ва оҳану пӯлоди Ухан бо роҳи ғелонидани хунук интихоб ва шакл дода мешаванд.
-

Системаи баландбардории баландсуръат
Лифти паллетаи мутақобила асосан аз қисмҳои асосӣ, аз қабили дастгоҳи рондан, платформаи бардоранда, блоки мувозинати муқобил, чаҳорчӯбаи берунӣ ва шабакаи берунӣ иборат аст.
-
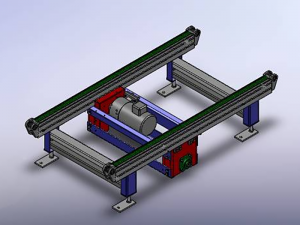
Системаи иттилоотии конвейери шаттли 4D
Мотор меҳвари гардонандаро аз гурӯҳи интиқол мегузаронад ва меҳвари гардонанда занҷири интиқолро барои иҷрои вазифаи интиқоли паллет меронад.