-

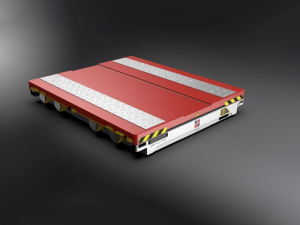
АМР
Аробачаи AMR, ин як мошини нақлиётӣ мебошад, ки бо дастгоҳҳои роҳнамоии автоматӣ ба монанди электромагнитӣ ё оптикӣ муҷаҳҳаз шудааст, ки метавонад бо роҳи роҳнамоии муқарраршуда ҳаракат кунад, муҳофизати бехатарӣ ва вазифаҳои гуногуни интиқол дорад. Дар барномаҳои саноатӣ, он як воситаи нақлиётест, ки ронанда талаб намекунад. Манбаи қувваи он батареяи барқгиранда мебошад.
AMR-и ғарқшуда: ба қаъри мошини боркаш ворид шавед ва ба таври худкор васл кунед ва ҷудо кунед, то амалиёти интиқол ва коркарди маводро амалӣ созед. Дар асоси технологияҳои гуногуни ҷойгиркунӣ ва навигатсионӣ, мошинҳои нақлиёти худкор, ки рондани одамро талаб намекунанд, дар маҷмӯъ ҳамчун AMR номида мешаванд.
-

Паллетизатор
Паллетизатор маҳсули омезиши органикии мошинҳо ва барномаҳои компютерӣ буда, самаранокии истеҳсолоти муосирро беҳтар мекунад. Мошинҳои паллетизатсия дар саноати паллетизатсия васеъ истифода мешаванд. Роботҳои паллетизатсия метавонанд арзиши меҳнат ва фазои ошёнаро хеле сарфа кунанд.
Роботи паллетизатсия чандир, дақиқ, зуд, самаранок, устувор ва муассир аст.
Системаи роботҳои паллетизатсия дастгоҳи роботи координатиро истифода мебарад, ки бартариҳои изофаи хурд ва ҳаҷми хурд дорад. Идеяи барпо намудани хатти васлкунии машинахои блоки пурра автоматй, пур-махсул ва сарфакунандаи энергия ба амал бароварда мешавад.
-

Мошини печонидани табақа
Мошини печонидани табақа як таҷҳизоти автоматӣ мебошад, ки онро мошини новаи рамзӣ низ меноманд, он дар системаи интиқоли табақа дар якҷоягӣ бо конвейерҳои гуногун барои тақсим кардани ҷўйборҳои холӣ ба хати интиқол истифода мешавад. Мошини печонидани табақа барои ҷойгир кардани паллетҳои ягона ба паллетҳо истифода мешавад, аз ҷумла: сохтори дастгирии паллет, мизи бардорандаи паллет, сенсори сарборӣ, муайянкунии мавқеъи паллет, сенсори кушода/пушидани робот, лифт, поён, гузаргоҳи мавқеи марказӣ.
-

RGV
RGV маънои мошини роҳнамои оҳанро дорад, ки онро троллейбус низ меноманд. RGV дар анборҳо бо усулҳои гуногуни нигаҳдории зичии баланд истифода мешавад ва гузаргоҳҳо метавонанд аз рӯи ҳар дарозӣ тарҳрезӣ шаванд, то иқтидори нигоҳдории тамоми анборро зиёд кунанд. Илова бар ин, ҳангоми кор, шумо инчунин метавонед аз он истифода баред, ки борбардор ба роҳи хатти ворид шудан лозим нест, дар якҷоягӣ бо ҳаракати босуръати троллейбус дар роҳи хаттӣ, он метавонад самаранокии кори анборро ба таври муассир беҳтар созад ва онро бехатартар кунад.
-

Навъи стандартии системаҳои shuttle 4D
Ҳамчун таҷҳизоти асосии анбори пуршиддати автомобилии чортарафа, мошини амудӣ ва уфуқӣ асосан аз васлаки раф, системаи электрикӣ, системаи таъминоти барқ, системаи гардонанда, системаи ҷӯйбор, системаи сенсор ва ғайра иборат аст.
-

Системаҳои shuttle 4D барои ҳарорати паст
Сохтори варианти паст-ҳарорати кроссбар асосан бо версияи стандартӣ якхела аст. Фарқи асосӣ дар муҳитҳои гуногуни корӣ мебошад. Варианти пасти ҳарораташ асосан дар муҳити -30 ℃ истифода мешавад, аз ин рӯ интихоби маводи дохилии он хеле гуногун аст. Ҳама ҷузъҳои дохилӣ муқовимат ба ҳарорати паст доранд, батарея инчунин як батареяи баландсифати ҳарорати паст мебошад, ки метавонад пуркунии барқро дар муҳити -30 °C дастгирӣ кунад. Илова бар ин, системаи назорати дохилӣ инчунин мӯҳр карда шудааст, то ҳангоми нигоҳдорӣ аз анбор берун рафтани оби конденсатӣ пешгирӣ карда шавад.
-

Системаҳои shuttle 4D барои истифодаи суръати баланд
Механизми версияи баландсуръати мошини амудӣ ва уфуқӣ аслан бо мошини муқаррарии амудӣ ва уфуқӣ якхела аст, фарқияти асосӣ дар такмил додани суръати роҳ аст. Бо назардошти молҳои нисбатан мунтазам ва устувори паллета, бо мақсади баланд бардоштани самаранокии умумии лоиҳа ва кам кардани шумораи сутунҳои истифодашуда, варианти баландсуръати паллета пешниҳод карда мешавад. Индекси суръати қадам аз версияи стандартӣ ду маротиба зиёдтар аст ва суръати ҳаракат бетағйир мемонад. Барои беҳтар кардани бехатарӣ, лазери бехатарӣ дар таҷҳизот муҷаҳҳаз шудааст, то хатари амалиёти баландсуръатро пешгирӣ кунад.
-
Системаҳои shuttle 4D барои татбиқи бори вазнин
Механизми чорчӯбаи борбардори вазнин асосан бо версияи стандартӣ якхела аст, фарқияти асосӣ дар он аст, ки қобилияти борбардории он хеле беҳтар шудааст. Иқтидори интиқоли он нисбат ба версияи стандартӣ тақрибан ду баробар зиёд мешавад ва мутаносибан суръати кораш низ коҳиш меёбад. Ҳам суръати пиёдагард ва ҳам суръати ҳаракат кам мешавад.
-

Racking зиччи барои 4D shuttles
Рафи анбори пуршиддати чорҷониба асосан аз қисмҳои рафҳо, рахҳои зерканал, роҳҳои зерканал, дастгоҳҳои пайвасткунаки уфуқӣ, чӯбҳои канали асосӣ, роҳҳои канали асосӣ, пайваст кардани рафҳо ва замин, пойҳои танзимшаванда, кашолакунӣ, тӯрҳои муҳофизатӣ, нардбонҳои нигоҳдорӣ иборат аст, Маводи асосии Q25Q ва Q. Baosteel ва Wuhan Iron and Steel бо прокати хунук интихоб ва ташкил карда мешаванд.
-

Системаи баландсуръати борбардорӣ
Лифт паллети мутаҳаррик асосан аз қисмҳои асосӣ ба монанди дастгоҳи ронандагӣ, платформаи бардоштан, блоки мувозинати муқобил, чаҳорчӯбаи берунӣ ва торҳои берунӣ иборат аст.
-
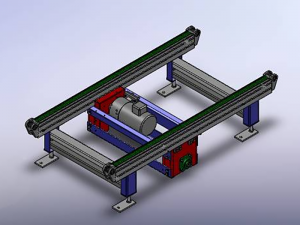
Системаи иттилоотии 4D конвейери shuttle
Мотор чоҳи гардонандаро тавассути гурӯҳи интиқол меронад ва чоҳи гардонанда занҷири интиқолро барои амалӣ кардани вазифаи интиқоли паллета меронад.
-

WCS-Системаи назорати анбор
Системаи WCS барои банақшагирии байни система ва таҷҳизот масъул аст ва фармонҳои аз ҷониби системаи WMS додашударо ба ҳар як таҷҳизот барои кори ҳамоҳангшуда мефиристад. Дар байни тачхизот ва системаи WCS алокаи доимй мавчуд аст. Вақте ки таҷҳизот вазифаро иҷро мекунад, системаи WCS ба таври худкор интишори маълумотро бо системаи WMS иҷро мекунад.